
Dr. Brown from Back to the Future was one of the reasons I decided to be an engineer. Not because he invented a time machine (pfff) but because of the machine he created to feed his dog (Einstein). If you haven’t seen that movie, stop reading this and go watch it.
Funny thing is that while some of my other friends in Engineering school wanted to become engineers because they wanted to go to the moon or something as far fetched as building a sentient cyborg, I just wanted to build cool gadgets for myself.
In this Blog Post I present a quick draft of how could we build a dog feeder using technology I’m familiar with: Microcontrollers, sensors, a mesh network and off the shelf mechanical components.
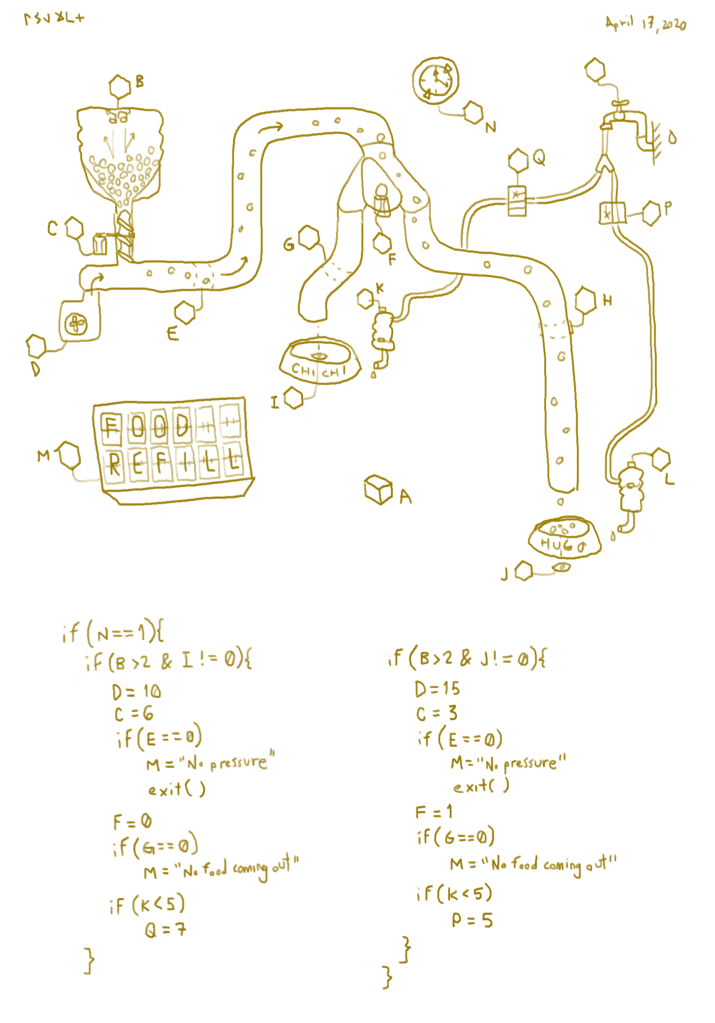
The basic idea is to have a mechanical timer/relay like those used in gardens advertise if it is time to do something or not. The way I would implement this is by reading whether current is passing or not (sensor N). Yes, I would have to translate from 220V to 5V but that’s not a big deal. I could just use a 220v to 5V transformer ( also known as a phone charger) to generate an input signal.
After that, I would check whether there is food in the main container. I was thinking about a sonar (sensor B) , I’ve worked with sonar sensors in the past and they are pretty reliable once you calibrate them. Here, it would know if there’s food based on how long it takes the ping to come back. A value of 2 is equivalent to 20% of the container being empty. Sonars don’t rely on light so I assume it will work with some food dust around.
In addition to checking if there’s food I need to verify whether there is food in the plate or not (sensor I) . I would place a small light sensor on the bottom of the plate. If light is detected, that means there is no food on the plate.
If all looks good I would start the motor that drives a dispenser screw (actuator C) for it to drop some food to the pipes that are already pressurized by the air pump (actuator D). Similar to when you vacuum your own home, it will drive the food kernels through the pressurized pipes all the way to the element F.
A vibration sensor (sensor E) detects whether food is hitting the walls of the pipes. If no vibration is detected that means no food is in the pipes and something must be wrong: Either no pressure or no food. We output an error message to the message board (actuator M) and exit the program. Sorry dogs, no robot serviced food for you today.
Once food makes it to the intersection F, it will go either left or right. Actuator F is just a ramp that moves to one side or the other letting the food fall in Chi Chi’s plate or in Hugo’s plate.
Maybe this is an overkill, but there’s yet another sensor in the pipe that detects whether food is passing through all the way to the plate. This is to confirm that F did its job properly. I could just instead check sensor I to figure out if the plate is filled in.
Because dogs also need water to live, specially after eating that processed food, we check the level of the water using a floating magnet. A magnetic field magnet checks the intensity of the field, infers how close the magnet is (sensor K) and determines the level of the water. If water is needed, the water valve Q is opened for a certain amount of seconds to fill the bottle.
And all this so we can focus on the Flux Capacitor…
